 平台热线
平台热线



安川机器人操作与编程
注:本文章文字,图片部分来自网络
版权归原作者,侵删。
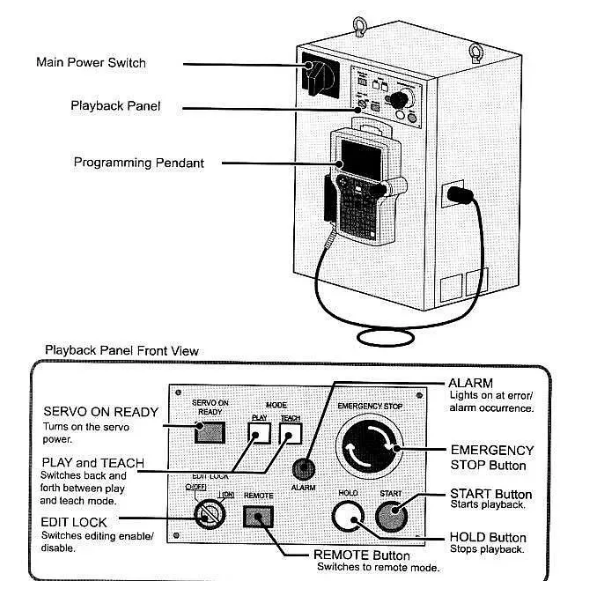
主电源开关和门锁位于XRC控制柜的面板上,示教盒挂在控制柜的右上方,再现面板位于控制柜的柜门上,如图所示。
再现面板上的按钮都用方括号及方括号中的文字表示。比如[TEACH]表示再现面板上的示教按钮。
操作顺序:
按下列操作顺序来使用机器人:
1) 开启XRC控制柜;
2) 示教机械人一种作业;
3) 机械人自动完成作业(称为“再现”);
4) 当完成作业后,关闭电源。
开启电源
当开启电源时,总是先打开主电源开关,然后开启伺服电源。在开启电源时,确保机械手周围区域是安全的。
开启主电源
将主电源开关拔向ON位置,开启主电源,系统将开始自我诊断。
开启诊断
当主电源开启后,系统将自检,并且在示教盒屏幕上显示开启信息
自检完成
上次电源关闭时,XRC 系统会保存所有状态数据。开启诊断完成后,系统自动调入停机时的作业。包括:、
开启伺服电源
在线模式
当保险装置闭合时,按[SERVO ON READY]开启伺服电源,该键指示灯亮,说明电源已开启。
注意:当保险装置断开时,伺服电源是不能打开的。
示教模式
(1)按再现面板上的[SERVO ON READY]按钮,开启伺服电源。开伺服电源之后,这个按钮点亮了
(2)按[TEACH LOCK]按钮进入示教模式。
(3)当操作者握紧手握急停开关时,伺服电源开启并且再现面板上的[SERVO ON READY]按钮
坐标类型
关节坐标:机械手的每一根轴相互独立运动。
直角坐标:与机械手的位置无关,它平行于X轴,Y轴,Z轴中的任意一轴运动。
用户坐标:机械手平行于用户坐标轴运动。
工具坐标:在任何一坐标系中,在固定的工具中心点(TCP: tool center point)的位置,只可能改变手腕方向。
相关更多信息,请立即在线或通过186-1656-9600与工博士联系。
